SLAU948 October 2024 MSPM0G3507
- 1
- Abstract
- Trademarks
- 1Introduction
-
2Hardware Setup
- 2.1 EVM Hardware Setup
- 2.2 Pin Configurations for PWM Outputs
- 2.3 Pin Configurations for ADC Currents
- 2.4 Pin Configurations for ADC Voltages
- 2.5 Pin Configurations for Hall Sensor Inputs Through GPIO
- 2.6 Pin Configurations for Faults
- 2.7 Pin Configurations for GPIO Output Functions
- 2.8 Pin Configurations for SPI Communication
- 2.9 Pin Configurations for UART Communication
- 2.10 External Connections for Evaluation Boards
- 3Software Setup
- 4GUI Setup
-
5Register Map
- 5.1 Register Map Page in GUI
- 5.2
User Control Registers (Base Address = 0x20200400h)
- 5.2.1 Speed Control Register (Offset = 0h) [Reset = 00000000h]
- 5.2.2 Algo Debug Control 1 Register (Offset = 4h) [Reset = 00000000h]
- 5.2.3 Algo Debug Control 2 Register (Offset = 8h) [Reset = 00000000h]
- 5.2.4 Algo Debug Control 3 Register (Offset = Ch) [Reset = 00000000h]
- 5.2.5 DAC Configuration Register (Offset = 10h) [Reset = 00000000h]
- 5.3
User Input Registers (Base Address = 0x20200000h)
- 5.3.1 SYSTEM_PARAMETERS (Offset = 0h)
- 5.3.2 MOTOR_STARTUP1 Register (Offset = 3Ch) [Reset = 00000000h]
- 5.3.3 MOTOR_STARTUP2 Register (Offset = 40h) [Reset = 00000000h]
- 5.3.4 CLOSED_LOOP1 Register (Offset = 44h) [Reset = 00000000h]
- 5.3.5 CLOSED_LOOP2 Register (Offset = 48h) [Reset = 00000000h]
- 5.3.6 FIELD_CTRL Register (Offset = 4Ch) [Reset = 00000000h]
- 5.3.7 FAULT_CONFIG1 Register (Offset = 50h) [Reset = 00000000h]
- 5.3.8 FAULT_CONFIG2 Register (Offset = 54h) [Reset = 00000000h]
- 5.3.9 MISC_ALGO Register (Offset = 58h) [Reset = 00000000h]
- 5.3.10 PIN_CONFIG Register (Offset = 5Ch) [Reset = 00000000h]
- 5.3.11 PERI_CONFIG Register (Offset = 60h) [Reset = 00000000h]
- 5.4 User Status Registers (Base Address = 0x20200430h)
- 6Basic Tuning
-
7Advanced Tuning
- 7.1
Control Configurations Tuning
- 7.1.1 Control Mode of Operation
- 7.1.2 Closed Loop Torque Control Mode
- 7.1.3 Closed Loop Power Control Mode
- 7.1.4 Closed Loop Speed Control Mode
- 7.1.5 Voltage Control Mode
- 7.1.6 Stopping Motor Quickly
- 7.1.7 Flux Weakening: Operating Motor at Speeds Higher Than Rated Speed
- 7.1.8 Maximum Torque Per Ampere : Improve Efficiency of IPMSM Motors
- 7.1.9 Preventing Supply Voltage Overshoot During Motor Stop.
- 7.1.10 Protecting the Power Supply
- 7.1.11 FOC Bandwidth Selection
- 7.1
Control Configurations Tuning
- 8Hardware Configurations
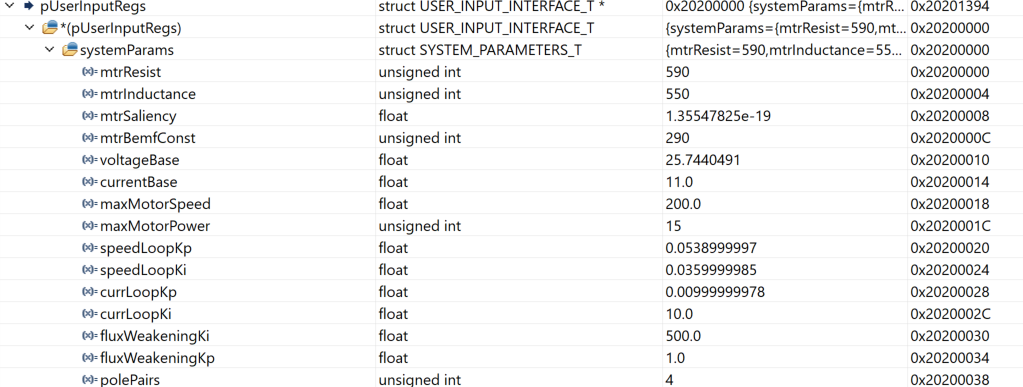
6.1 System Configuration Parameters
The system configuration defines the parameters associated with the motor control system to start the motor spinning in closed loop modes.
Below are the set of System parameters that are to be specified for full featured Sensored FOC operation. These variables can be added in the expression window using the pUserInputRegs.
Note: Motor resistance , Motor Inductance
are used for the initial estimation of Current Loop Kp & Ki values.Ignore configuring
these parameters if Current Loop Kp and Ki are tuned manually.
Note: Motor Inductance, Saliency and Motor
BEMF Constant of the Motor are critical for the operation of MTPA algorithm. If salient
pole motor is used (Interior PMSM) and MTPA is enabled these parameters must be
configured.