SSZTAT2 october 2016
When you hear EV – electric vehicles – you may immediately think of energy barreling down the highway. But in actuality electric vehicles span a huge range of products. EVs are any transportation device whose propulsion system is driven by an electric motor (a mixed electric / internal combustion system would be termed a hybrid electric), but a broader definition of the term can even expand to the electrification (use of electric motors to replace hydraulic or belt driven systems) in both electric and non-electric propulsion systems. And this electrification often leads to the need for other power conversion sub-systems; battery management, battery charging (on-vehicle or off-board stations), regeneration/recuperation charging, DC-DC conversion and DC-AC inversion.

For this discussion we want to focus on the motor control sub-systems. Again, your first thought probably goes to the amazing multi-kilowatt AC (asynchronous induction or permanent magnet synchronous) propulsion (traction) motors which are the power plant (and internal combustion replacement or supplement) for large cars, buses and fleet vehicles. These traction motors – even when used in something smaller like a small electric cart - create the torque required to move the vehicle.
Most propulsion systems require very smooth control from zero and during very low speed operation and are often integral to the overall operation of the product. For this reason rotor sensors are almost always used. In small personal transport devices these might be low cost magnetic hall sensors while in larger highway bound applications they may use resolvers. Resolvers are an analog absolute position sensor known for their overall robustness and compact footprint. Resolver sensors are stimulated by a sinusoidal carrier input and the absolute position of the rotor is encoded onto a pair of amplitude modulated sinusoidal outputs. These outputs can then be captured and decoded to produce a digital version of the absolute rotor angle that can be used by the digital motor controller. One popular method of implementing a resolver interface is by use of a stand-alone resolver to digital converter (like TI’s PGA411-Q1). Another method is to integrate - through use of software and programmable peripherals - the key excitation and analog to digital decode into the motor controller itself with just some simple external circuits required for interface. This is a unique capability offered on our Delfino™ F2837x and Piccolo™ F2807x microcontrollers (MCUs).
While these propulsion motors are great, they also are the star of the show when it comes to EV. So the focus of the rest of this blog is on the bevy of other electric motors that must be controlled.
Most of these other motors are low voltage and low to medium current which are perfect fits for TI motor control and drive technology.
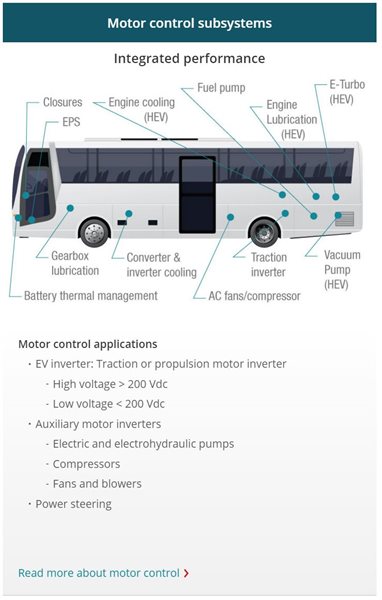
Auxiliary motors refer to those used to run auxiliary functions which historically have been driven off of a belt (energy from the internal combustion engine) or hydraulic system. Air conditioning compressors, water / oil / cooling fluid pumps, fans, blowers, turbos, closures and even various tools (lifts, grips, etc. on farm equipment, forklifts, et al.) that now need to run from an electric motor. Most of these applications are quite similar in nature with a low voltage bus (12, 24, or 48-V most common) and low to medium current (<5A to 50A). The motor is used to control variable speeds or torques under varying loads. While some may still use hall sensors for commutation for historical reasons, almost all are in application use cases (higher speeds) which can be done without a sensor if the developer has the proper hardware and software expertise.
There are two related trends in this market which are interesting to note. The first is that many traditional suppliers for these types of sub-systems have been experts in the belt driven or hydraulic versions - or even in the motors themselves - but not necessarily in electronic motor controls! The second is that many EV customers who have been buying motors and motor controllers for these auxiliary systems – especially if their focus is on the propulsion system - are investigating if it is viable and economically profitable to bring the designs of these auxiliary control sub-systems in-house. This is leading to a shift in the market: EV customers evaluating if they can do the designs themselves; existing suppliers looking for the latest control technology to keep their motor plus control business; and motor control suppliers from adjacent industries (appliance and industrial) looking to expand their customer base by becoming new suppliers or by providing design expertise. The desires of all three are the same: rapidly evaluate then develop low voltage, high performance, high efficiency, sensorless motor control systems for a variety of possibly changing motors being applied in a variety of EV applications.
In the next installment we will discuss in more detail the control of these other motors.
To learn more about EV and motor control visit the below links:
- Continue reading our blog series on motors in electric vehicles:
- Learn more about EV devices
- Start developing your next motor with Delfino F2837x MCUs
- Start developing your next motor with Piccolo F2807x MCUs
- Download the motor control whitepaper for your EV device
- Read our white paper: Intelligent batter management and charging for electric vehicles
- TI Technology Enables High-Power EV DC Fast Charging Stations