SLAU927B June 2024 – November 2024 MSPM0G3507
- 1
- Abstract
- Trademarks
- 1Introduction
-
2Hardware Setup
- 2.1 EVM Hardware Setup
- 2.2 Pin Configurations for IPD Usage
- 2.3 Pin Configurations for PWM Outputs
- 2.4 Pin Configurations for ADC Currents
- 2.5 Pin Configurations for ADC Voltages
- 2.6 Pin Configurations for Faults
- 2.7 Pin Configurations for GPIO Output Functions
- 2.8 Pin Configurations for SPI Communication
- 2.9 Pin Configurations for UART Communication
- 2.10 External Connections for Evaluation Boards
- 3Software Setup
- 4GUI Setup
-
5Register Map
- 5.1 Register Map Page in GUI
- 5.2
User Control Registers (Base Address = 0x20200400h)
- 5.2.1 Speed Control Register (Offset = 0h) [Reset = 00000000h]
- 5.2.2 Algo Debug Control 1 Register (Offset = 4h) [Reset = 00000000h]
- 5.2.3 Algo Debug Control 2 Register (Offset = 8h) [Reset = 00000000h]
- 5.2.4 Algo Debug Control 3 Register (Offset = Ch) [Reset = 00000000h]
- 5.2.5 DAC Configuration Register (Offset = 10h) [Reset = 00000000h]
- 5.3
User Input Registers (Base Address = 0x20200000h)
- 5.3.1 SYSTEM_PARAMETERS (Offset = 0h)
- 5.3.2 ISD_CONFIG Register (Offset = 38h) [Reset = 00000000h]
- 5.3.3 RVS_DRV_CONFIG Register (Offset = 3Ch) [Reset = 00000000h]
- 5.3.4 MOTOR_STARTUP1 Register (Offset = 40h) [Reset = 00000000h]
- 5.3.5 MOTOR_STARTUP2 Register (Offset = 44h) [Reset = 00000000h]
- 5.3.6 CLOSED_LOOP1 Register (Offset = 48h) [Reset = 00000000h]
- 5.3.7 CLOSED_LOOP2 Register (Offset = 4Ch) [Reset = 00000000h]
- 5.3.8 FIELD_CTRL Register (Offset = 50h) [Reset = 00000000h]
- 5.3.9 FAULT_CONFIG1 Register (Offset = 54h) [Reset = 00000000h]
- 5.3.10 FAULT_CONFIG2 Register (Offset = 58h) [Reset = 00000000h]
- 5.3.11 MISC_ALGO Register (Offset = 5Ch) [Reset = 00000000h]
- 5.3.12 PIN_CONFIG Register (Offset = 60h) [Reset = 00000000h]
- 5.3.13 PERI_CONFIG Register (Offset = 64h) [Reset = 00000000h]
- 5.4 User Status Registers (Base Address = 0x20200430h)
- 6Basic Tuning
-
7Advanced Tuning
- 7.1
Control Configurations Tuning
- 7.1.1 Control Mode of Operation
- 7.1.2 Initial Speed Detection of the Motor for Reliable Motor Resynchronization
- 7.1.3 Unidirectional Motor Drive Detecting Backward Spin
- 7.1.4 Preventing Back Spin of Rotor During Startup
- 7.1.5 Gradual and Smooth Start up Motion
- 7.1.6 Faster Startup Timing
- 7.1.7 Stopping Motor Quickly
- 7.1.8 Flux Weakening: Operating Motor at Speeds Higher than Rated Speed
- 7.1.9 Maximum Torque Per Ampere : Improve Efficiency of IPMSM Motors
- 7.1.10 Preventing Supply Voltage Overshoot During Motor Stop.
- 7.1.11 Protecting the Power Supply
- 7.1.12 FOC Bandwidth Selection
- 7.1
Control Configurations Tuning
- 8Hardware Configurations
- 9Revision History
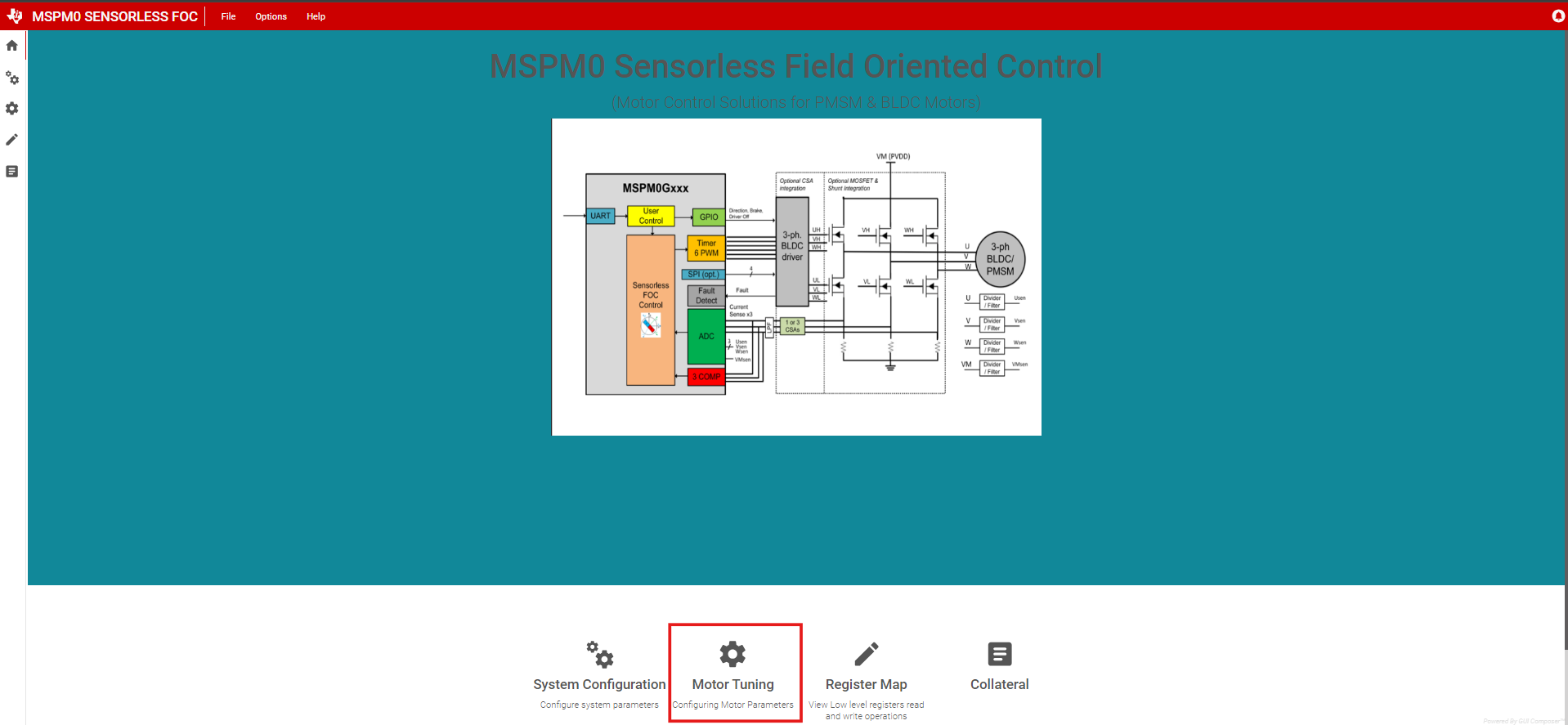
4.5 Motor Tuning Page
User can set the speed command and monitor the motor status and fault variables from this window.