JAJSL46A August 2022 – December 2022 DRV8452
PRODUCTION DATA
- 1 特長
- 2 アプリケーション
- 3 概要
- 4 改訂履歴
- 5 ピン構成および機能
- 6 仕様
-
7 詳細説明
- 7.1 概要
- 7.2 機能ブロック図
- 7.3
機能説明
- 7.3.1 動作インターフェイス
- 7.3.2 ステッパ・モーター・ドライバの電流定格
- 7.3.3 PWM モーター・ドライバ
- 7.3.4 マイクロステッピング・インデクサ
- 7.3.5 インデクサ出力
- 7.3.6 自動マイクロステッピング・モード
- 7.3.7 カスタム・マイクロステッピング表
- 7.3.8 電流レギュレーション
- 7.3.9 電流レギュレーション減衰モード
- 7.3.10 外付け抵抗による電流検出
- 7.3.11 サイレント・ステップ減衰モード
- 7.3.12 自動トルクの動的電流調整
- 7.3.13 静止電力節約モード
- 7.3.14 チャージ・ポンプ
- 7.3.15 リニア電圧レギュレータ
- 7.3.16 VCC 電圧電源
- 7.3.17 ロジックレベル、トライレベル、クワッドレベルのピン配置図
- 7.3.18 スペクトラム拡散
- 7.3.19 保護回路
- 7.3.20 デバイスの機能モード
- 7.4 プログラミング
- 7.5
レジスタ・マップ
- 7.5.1 ステータス・レジスタ
- 7.5.2
制御レジスタ
- 7.5.2.1 CTRL1 (アドレス=0x04) [デフォルト=0Fh]
- 7.5.2.2 CTRL2 (アドレス=0x05) [デフォルト=06h]
- 7.5.2.3 CTRL3 (アドレス=0x06) [デフォルト=38h]
- 7.5.2.4 CTRL4 (アドレス=0x07) [デフォルト=49h]
- 7.5.2.5 CTRL5 (アドレス=0x08) [デフォルト=03h]
- 7.5.2.6 CTRL6 (アドレス=0x09) [デフォルト=20h]
- 7.5.2.7 CTRL7 (アドレス=0x0A) [デフォルト=FFh]
- 7.5.2.8 CTRL8 (アドレス=0x0B) [デフォルト=0Fh]
- 7.5.2.9 CTRL9 (アドレス=0x0C) [デフォルト=10h]
- 7.5.2.10 CTRL10 (アドレス=0x0D) [デフォルト=80h]
- 7.5.2.11 CTRL11 (アドレス=0x0E) [デフォルト=FFh]
- 7.5.2.12 CTRL12 (アドレス=0x0F) [デフォルト=20h]
- 7.5.2.13 CTRL13 (アドレス=0x10) [デフォルト=10h]
- 7.5.3 インデクサ・レジスタ
- 7.5.4
カスタム・マイクロステッピング・レジスタ
- 7.5.4.1 CUSTOM_CTRL1 (アドレス=0x16) [デフォルト=00h]
- 7.5.4.2 CUSTOM_CTRL2 (アドレス=0x17) [デフォルト=00h]
- 7.5.4.3 CUSTOM_CTRL3 (アドレス=0x18) [デフォルト=00h]
- 7.5.4.4 CUSTOM_CTRL4 (アドレス=0x19) [デフォルト=00h]
- 7.5.4.5 CUSTOM_CTRL5 (アドレス=0x1A) [デフォルト=00h]
- 7.5.4.6 CUSTOM_CTRL6 (アドレス=0x1B) [デフォルト=00h]
- 7.5.4.7 CUSTOM_CTRL7 (アドレス=0x1C) [デフォルト=00h]
- 7.5.4.8 CUSTOM_CTRL8 (アドレス=0x1D) [デフォルト=00h]
- 7.5.4.9 CUSTOM_CTRL9 (アドレス=0x1E) [デフォルト=00h]
- 7.5.5
自動トルク・レジスタ
- 7.5.5.1 ATQ_CTRL1 (アドレス=0x1F) [デフォルト=00h]
- 7.5.5.2 ATQ_CTRL2 (アドレス=0x20) [デフォルト=00h]
- 7.5.5.3 ATQ_CTRL3 (アドレス=0x21) [デフォルト=00h]
- 7.5.5.4 ATQ_CTRL4 (アドレス=0x22) [デフォルト=20h]
- 7.5.5.5 ATQ_CTRL5 (アドレス=0x23) [デフォルト=00h]
- 7.5.5.6 ATQ_CTRL6 (アドレス=0x24) [デフォルト=00h]
- 7.5.5.7 ATQ_CTRL7 (アドレス=0x25) [デフォルト=00h]
- 7.5.5.8 ATQ_CTRL8 (アドレス=0x26) [デフォルト=00h]
- 7.5.5.9 ATQ_CTRL9 (アドレス=0x27) [デフォルト=00h]
- 7.5.5.10 ATQ_CTRL10 (アドレス=0x28) [デフォルト=08h]
- 7.5.5.11 ATQ_CTRL11 (アドレス=0x29) [デフォルト=0Ah]
- 7.5.5.12 ATQ_CTRL12 (アドレス=0x2A) [デフォルト=FFh]
- 7.5.5.13 ATQ_CTRL13 (アドレス=0x2B) [デフォルト=05h]
- 7.5.5.14 ATQ_CTRL14 (アドレス=0x2C) [デフォルト=0Fh]
- 7.5.5.15 ATQ_CTRL15 (アドレス=0x2D) [デフォルト=00h]
- 7.5.5.16 ATQ_CTRL16 (アドレス=0x2E) [デフォルト=FFh]
- 7.5.5.17 ATQ_CTRL17 (アドレス=0x2F) [デフォルト=00h]
- 7.5.5.18 ATQ_CTRL18 (アドレス=0x30) [デフォルト=00h]
- 7.5.6 サイレント・ステップ・レジスタ
- 8 アプリケーションと実装
- 9 熱に関する注意事項
- 10電源に関する推奨事項
- 11レイアウト
- 12デバイスおよびドキュメントのサポート
- 13メカニカル、パッケージ、および注文情報
パッケージ・オプション
メカニカル・データ(パッケージ|ピン)
サーマルパッド・メカニカル・データ
発注情報
7.3.6 自動マイクロステッピング・モード
DRV8452 が SPI インターフェイスで動作しているとき、自動マイクロステッピング・モードは入力ステップ・パルスを補間し、より高い分解能のマイクロステップに対応する電流波形を生成します。これによって、スムーズな正弦波電流が得られ、あらゆるステップ周波数でノイズのない動作が可能になります。
- 自動マイクロステッピングがディセーブルの場合、システム・コントローラは強制的に高周波数のステップ信号を出力して、高い分解能のマイクロステッピング電流波形を生成します。
- 自動マイクロステッピングがイネーブルの場合、低周波数のステップ信号によって滑らかな電流波形を生成することができます。
- これにより、コントローラのオーバーヘッドは大幅に減少するため、3D プリンタや工場のオートメーション、医療機器などのアプリケーションに有用です。
- 補間された周波数は、ステッパ・モーターの共振周波数帯域まで下降しないことに注意してください。
自動マイクロステッピング・モードをイネーブルにするには、EN_AUTO ビットを「1b」にする必要があります。
図 7-7 に、自動マイクロステッピングを使用した場合と使用しない場合のモーター角の増加を示します。自動マイクロステッピングを使用しない場合 (赤線)、モーター角はステップ入力のアクティブ・エッジごとに大きく増加します。自動マイクロステッピングを使用すると (緑線)、モーター角は非常に滑らかに変化します。
DRV8452 は、1/32、1/64、1/128、1/256 マイクロステッピング・レベルへの補間をサポートしており、この設定は 表 7-13 に示すように、RES_AUTO ビットで行われます。補間設定は、実行中に変更できます。
|
RES_AUTO |
補間 |
|---|---|
|
00b (デフォルト) |
1/256 |
|
01b |
1/128 |
|
10b |
1/64 |
|
11b |
1/32 |
表 7-14 は、コイル電流、および EN_AUTO ビットにそれぞれ「1b」と「0b」を書き込むことによるハーフステップ・モードと自動マイクロステッピング・モードの滑らかな遷移を示しています。ハーフステップと 1/256 の自動マイクロステッピング・モードでは、ステップ周波数は同じであることに注意してください。
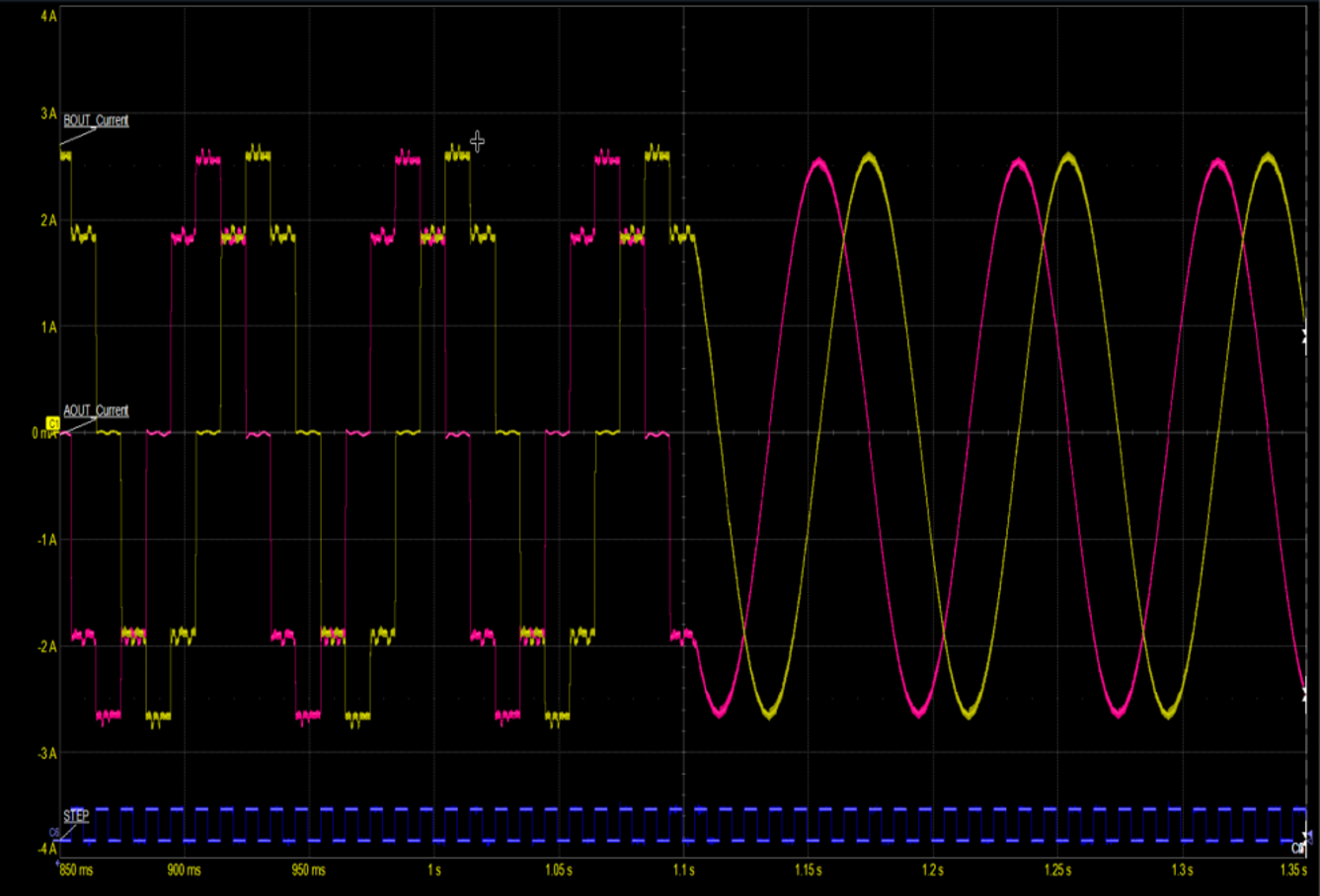 |
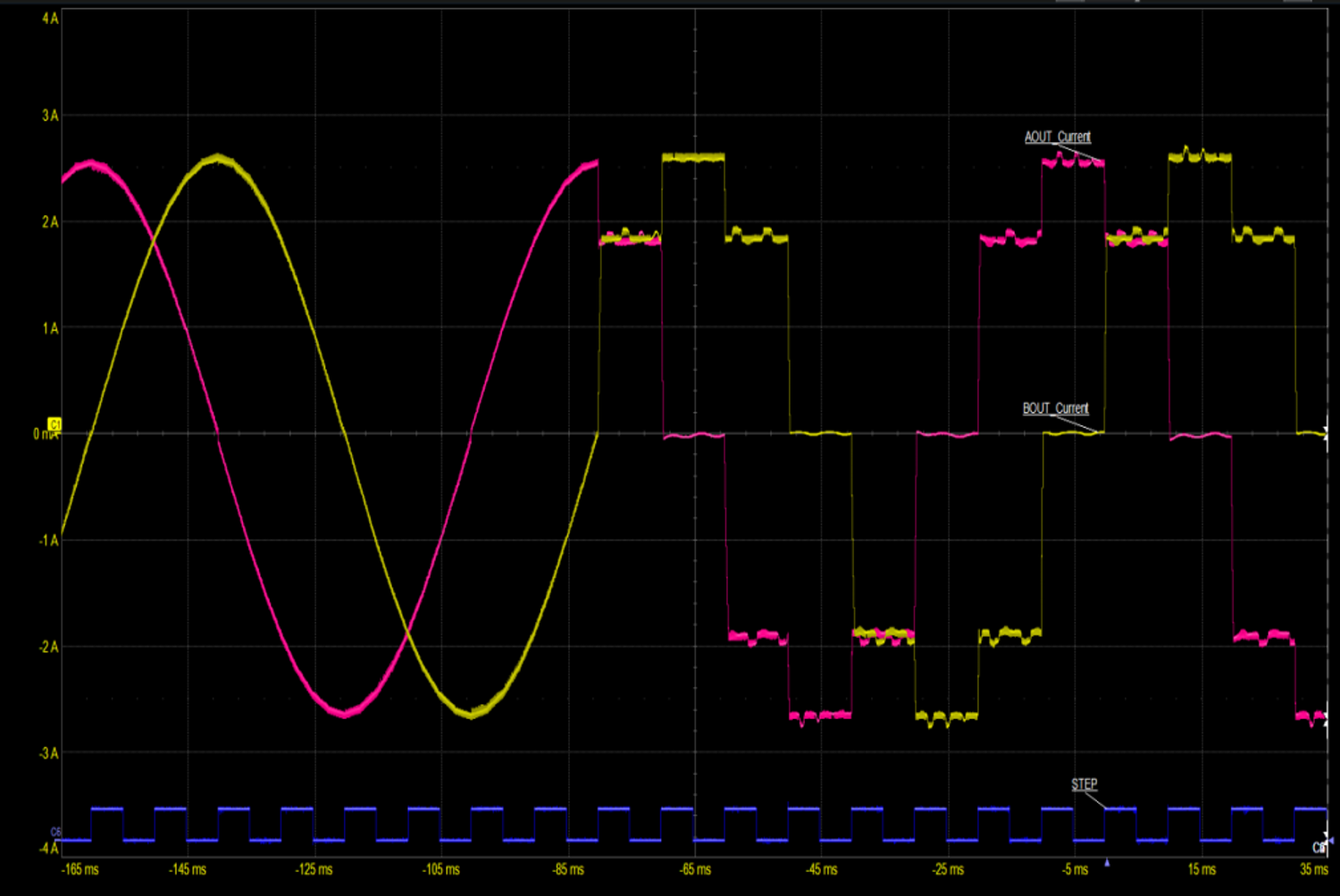 |
|
ハーフステップ・モードから 1/256 の自動マイクロステッピングへの遷移 |
1/256 の自動マイクロステッピングからハーフステップ・モードへの遷移 |
図 7-8 に示すように、補間は前の 2 つのステップ・パルス間の時間に基づいて行われます。前のインターバル時間は、RES_AUTO ビットの設定に応じて、均等に補間されます。
入力ステップ周波数が前のインターバルから低下する場合 (図のセグメント「1」)、モーターは次のステップのアクティブ・エッジが発生するまで、同じポジションを維持します。EN_STSL ビットが「1b」で、tSTSL_DLY が経過するまでに次のアクティブ・エッジが発生しなかった場合、デバイスは静止電力節約モードに移行します。次にステップのアクティブ・エッジが発生すると、静止電力節約モードは終了します。
前のインターバルからステップ周波数が増加する場合 (図のセグメント「2」)、次のステップのアクティブ・エッジが来ると、モーター角はスムーズに自動補正され、インデクサはステップ入力に応じたポジションに移動します。セグメント「3」では、モーター角はセグメント「2」のステップ周波数に対応して、より高速に増加します。
自動マイクロステッピング・モードでは、ステップ入力の周波数が 10Hz から 300kHz の間であることが必要です。
10Hz 未満のフルステップ相当のステップ周波数で自動マイクロステッピングを実現するには、自動マイクロステッピングを有効にする前に、より高い分解能のマイクロステッピング設定を使用します。
たとえば、フルステップ・モードでの 1Hz のステップ周波数は、1/16 マイクロステッピング・モードでの 16Hz のステップ周波数に相当します。そのため、フルステップで 1Hz のステップ入力で自動マイクロステッピングを使用する場合は、MICROSTEP_MODE を 0110b (1/16 マイクロステップ) に設定し、RES_AUTO ビットを使用して希望の補間レベルを実現できます。